目录
引言
上下文回顾
在上一篇文章中,我们深入探讨了 Rust 中 Future 的概念和实现原理。
我们了解到 Future 是异步编程的基础抽象,它代表了一个可能在未来完成的值。
任务基础
关键概念速览
在深入细节之前,让我们先快速了解本文将要讨论的核心概念:
| 概念 | 描述 | 主要作用 |
|---|---|---|
Future | 代表未来可能的值 | 定义异步操作 |
Task | Future 的运行时实例 | 管理异步操作的执行 |
Spawn | 任务创建机制 | 提交任务到执行器 |
JoinHandle | 任务控制句柄 | 等待和管理任务结果 |
Waker | 任务唤醒机制 | 通知执行器任务可继续执行 |
快速上手示例
use tokio;
use std::time::Duration;
#[tokio::main]
async fn main() {
// 1. 创建一个简单的异步任务
let handle = tokio::spawn(async {
println!("Task started");
tokio::time::sleep(Duration::from_secs(1)).await;
println!("Task completed");
"Task result"
});
// 2. 等待任务完成
let result = handle.await.unwrap();
println!("Got result: {}", result);
}
任务的定义与作用
任务(Task)是异步运行时中的最小执行单位,它封装了一个 Future 实例及其执行上下文。
每个任务代表一个独立的异步操作流程。
Future的定义
// 当你定义一个异步函数或块时,实际上是定义了一个 Future
async fn my_async_function() -> Result<String, Error> {
// 这个函数会返回一个实现了 Future trait 的类型
// 而不是直接返回 Result<String, Error>
}
// 或者使用 async 块
let future = async {
// 这里的代码定义了 Future 的行为
};
- Task 的创建
// 当你使用 spawn 或类似的方法来执行 Future 时,运行时会将 Future 封装为 Task
tokio::spawn(my_async_function()); // Future 被转换为 Task 并提交给执行器
让我用一个类比来说明:
-
Future 就像是一个"食谱":
- 描述了"要做什么"
- 包含了所有必要的步骤
- 但还没有真正开始执行
-
Task 就像是"正在烹饪的过程":
- 是
Future的运行时实例 - 包含了实际执行的状态
- 有自己的资源和上下文
- 是
-
任务与 Future 的关系 任务是
Future的运行时表示:
Future定义了异步操作的逻辑Task负责管理Future的执行状态Task处理与执行器的交互
让我画个简单的图来说明这个关系:

关键区别:
-
Future(特征/定义)
- 是一个特征(
trait) - 定义了异步计算的逻辑
- 是静态的定义
- 可以被多次执行
- 不包含执行状态
- 是一个特征(
-
Task(运行时实例)
- 是
Future的运行时表示 - 包含执行状态和上下文
- 是动态的实例
- 有自己的生命周期
- 包含调度信息
- 是
实际使用示例:
// 1. 定义 Future
async fn fetch_data(url: String) -> Result<String, Error> {
// 异步操作的定义
let response = reqwest::get(&url).await?;
let text = response.text().await?;
Ok(text)
}
// 2. 创建多个 Task
async fn main() {
// 同一个 Future 定义可以创建多个不同的 Task
let task1 = tokio::spawn(fetch_data("url1".to_string()));
let task2 = tokio::spawn(fetch_data("url2".to_string()));
// 等待所有 Task 完成
let (result1, result2) = join!(task1, task2);
}
这种设计的优点:
- 灵活性:同一个
Future可以被多次执行 - 资源管理:
Task可以独立管理资源 - 并发控制:执行器可以有效调度多个
Task - 状态隔离:每个
Task有自己的执行状态
理解这个关系对于编写高效的异步代码很重要,因为它帮助我们:
- 更好地组织异步代码结构
- 理解执行流程
- 处理并发和资源管理
- 优化性能
任务的生命周期
任务从创建到完成经历以下阶段:
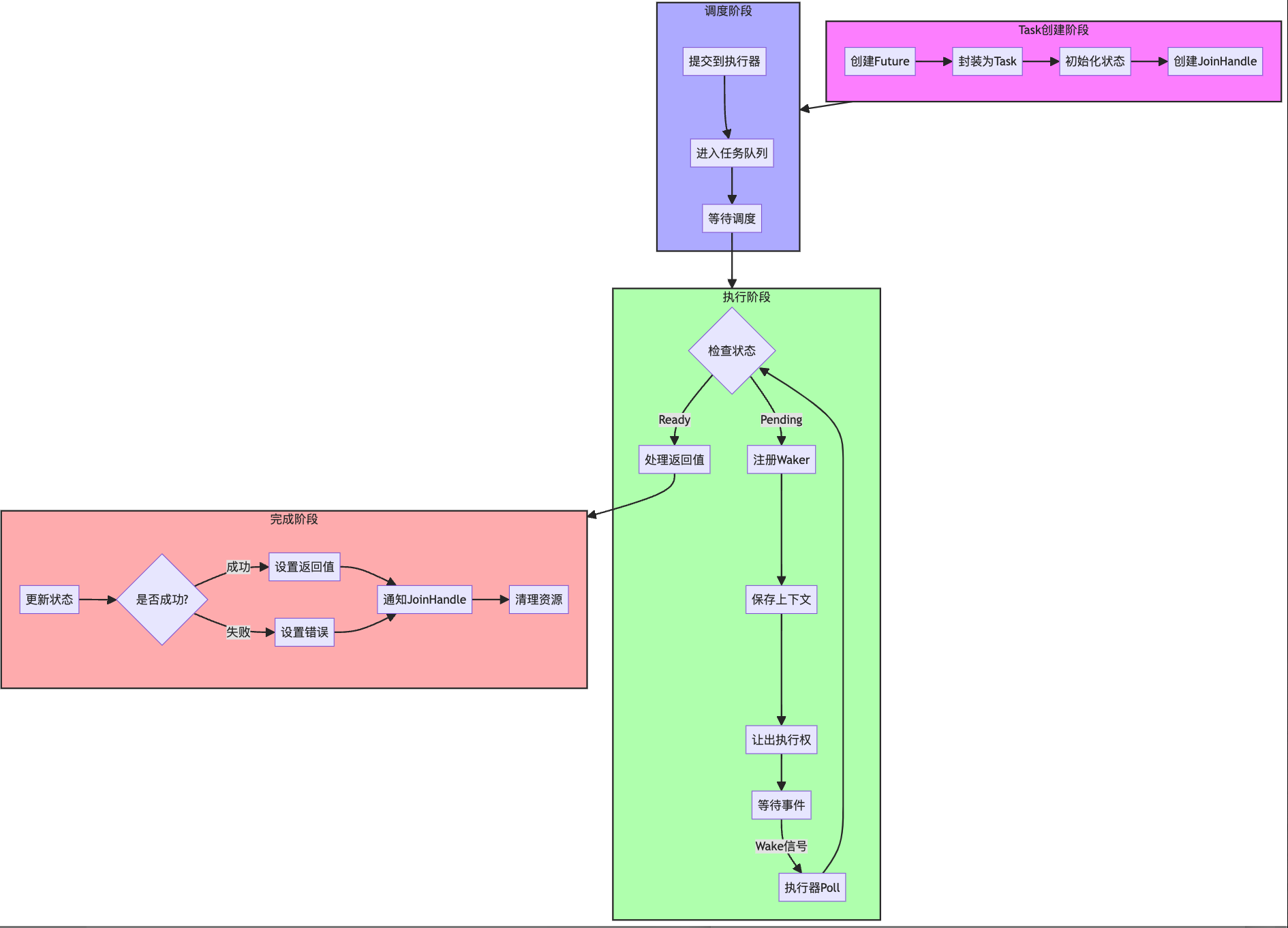
- 创建阶段:任务被构造并初始化
- 调度阶段:任务被提交到执行器
- 执行阶段:任务被轮询(
poll)执行 - 等待阶段:任务等待资源或事件
- 完成阶段:任务执行完成或失败
任务的核心组件
动态分发(Dyn)
为什么需要动态分发
在异步运行时中,我们需要管理不同类型的 Future。
动态分发允许我们用统一的方式处理这些 Future。
// 动态 Future 类型定义
type DynFuture = Pin<Box<dyn Future<Output = ()> + Send>>;
// 使用示例
fn store_future<F>(future: F)
where
F: Future<Output = ()> + Send + 'static
{
let boxed: DynFuture = Box::pin(future);
// 存储或处理 boxed future
}
性能考虑
动态分发虽然提供了灵活性,但也带来了一些开销:
- 额外的内存分配(
Box) - 虚表查找的开销
- 潜在的缓存未命中
Spawn 机制
基本概念
spawn 是向执行器提交任务的标准方式:
pub fn spawn<F>(future: F) -> JoinHandle<F::Output>
where
F: Future + Send + 'static,
F::Output: Send + 'static,
{
// 创建任务并返回句柄
let (handle, task) = create_task(future);
// 提交任务到执行器
EXECUTOR.submit(task);
handle
}
实现细节
高效的任务生成机制需要考虑:
- 任务状态管理
- 资源分配策略
- 错误处理机制
JoinHandle
设计思想
JoinHandle 提供了等待任务完成的机制:
pub struct JoinHandle<T> {
state: Arc<Mutex<JoinState<T>>>,
}
enum JoinState<T> {
Running(Waker),
Completed(T),
Failed(Error),
}
impl<T> Future for JoinHandle<T> {
type Output = Result<T, Error>;
fn poll(self: Pin<&mut Self>, cx: &mut Context<'_>) -> Poll<Self::Output> {
let mut state = self.state.lock().unwrap();
match &*state {
JoinState::Completed(value) => Poll::Ready(Ok(value.clone())),
JoinState::Failed(error) => Poll::Ready(Err(error.clone())),
JoinState::Running(_) => {
*state = JoinState::Running(cx.waker().clone());
Poll::Pending
}
}
}
}
唤醒机制
Waker 的作用
Waker 负责在任务可继续执行时通知执行器:
pub struct CustomWaker {
task_id: TaskId,
task_queue: Arc<Mutex<TaskQueue>>,
}
impl Wake for CustomWaker {
fn wake(self: Arc<Self>) {
let mut queue = self.task_queue.lock().unwrap();
queue.push(self.task_id);
}
}
实践示例
基础使用模式
#[tokio::main]
async fn main() {
// 创建多个任务
let mut handles = Vec::new();
for i in 0..5 {
let handle = tokio::spawn(async move {
println!("Task {} started", i);
tokio::time::sleep(Duration::from_secs(1)).await;
println!("Task {} completed", i);
i
});
handles.push(handle);
}
// 等待所有任务完成
for handle in handles {
let result = handle.await.unwrap();
println!("Got result: {}", result);
}
}
高级应用场景
任务取消
async fn cancellable_task(cancel: CancellationToken) -> Result<(), Error> {
loop {
tokio::select! {
_ = cancel.cancelled() => {
println!("Task cancelled");
return Ok(());
}
_ = async_operation() => {
println!("Operation completed");
}
}
}
}
最佳实践与性能优化
任务粒度
- 避免过细的任务粒度
- 合理批处理小任务
- 控制任务数量
批处理优化示例
use futures::stream::{self, StreamExt};
use tokio::task;
async fn process_items_batched(items: Vec<i32>) -> Result<(), Error> {
// 将items分批处理
let batch_size = 100;
let mut batches = stream::iter(items)
.chunks(batch_size)
.map(|chunk| {
task::spawn(async move {
for item in chunk {
process_single_item(item).await?;
}
Ok::<_, Error>(())
})
})
.buffer_unwind(10); // 控制并发数量
while let Some(result) = batches.next().await {
result??; // 处理错误
}
Ok(())
}
// 对比:细粒度任务版本
async fn process_items_fine_grained(items: Vec<i32>) -> Result<(), Error> {
let handles: Vec<_> = items
.into_iter()
.map(|item| {
task::spawn(async move {
process_single_item(item).await
})
})
.collect();
for handle in handles {
handle.await??;
}
Ok(())
}
资源管理
- 使用资源池
- 实现超时机制
- 处理任务泄漏
资源限制
use tokio::sync::Semaphore;
async fn with_limit<F, T>(
sem: Arc<Semaphore>,
task: F
) -> Result<T, Error>
where
F: Future<Output = Result<T, Error>>,
{
let _permit = sem.acquire().await?;
task.await
}
连接池管理
use bb8::Pool;
async fn create_pool() -> Pool<MyConnectionManager> {
let manager = MyConnectionManager::new("connection_string");
Pool::builder()
.max_size(15)
.min_idle(Some(5))
.build(manager)
.await
.unwrap()
}
超时控制
async fn with_timeout<F, T>(future: F, duration: Duration) -> Result<T, TimeoutError>
where
F: Future<Output = T>,
{
timeout(duration, future).await
}
错误处理
- 实现优雅降级
- 添加重试机制
- 日志记录
健壮的错误处理模式
use tokio::time::timeout;
use backoff::{ExponentialBackoff, backoff::Backoff};
async fn robust_task() -> Result<(), Error> {
// 1. 超时处理
let operation_result = timeout(
Duration::from_secs(5),
async {
// 你的异步操作
Ok::<_, Error>(())
}
).await??;
// 2. 重试机制
let mut backoff = ExponentialBackoff::default();
let retry_result = async {
loop {
match async_operation().await {
Ok(value) => break Ok(value),
Err(e) => {
if let Some(duration) = backoff.next_backoff() {
tokio::time::sleep(duration).await;
continue;
}
break Err(e);
}
}
}
}.await?;
// 3. 资源清理
struct CleanupGuard<T>(T);
impl<T> Drop for CleanupGuard<T> {
fn drop(&mut self) {
// 清理资源
}
}
let _guard = CleanupGuard(resource);
Ok(())
}
任务粒度优化
以下是不同任务粒度的性能对比:
| 策略 | 优点 | 缺点 | 适用场景 |
|---|---|---|---|
| 细粒度 | 更好的响应性 | 更高的调度开销 | IO密集型,需要快速响应 |
| 批处理 | 更低的开销 | 延迟可能增加 | CPU密集型,吞吐量优先 |
| 混合模式 | 平衡的性能 | 实现复杂 | 复杂业务场景 |
参考资料
- Rust 异步编程文档:async-book
- [Tokio 文档:tokio.rs]](https://tokio.rs/)
- Rust RFC 2592:futures-api-v0.3