在计算机视觉领域,目标检测是一个关键任务,广泛应用于安防监控、自动驾驶、智能零售等多个场景。 随着深度学习的发展,许多高效的目标检测模型如YOLOv8被广泛使用。 为了在生产环境中高效部署这些模型,ONNXRuntime作为一种跨平台的高性能推理引擎,成为了理想的选择。 本文将详细介绍如何使用ONNXRuntime进行目标检测,并通过代码示例展示整个流程。
目录
什么是ONNXRuntime?
ONNXRuntime 是由微软开发的一个高性能推理引擎,支持多种硬件加速器和操作系统。 它兼容ONNX(Open Neural Network Exchange)格式,这是一种开放的深度学习模型交换格式, 使模型在不同框架之间的迁移变得更加容易。
为什么选择ONNXRuntime进行目标检测?
- 高性能:ONNXRuntime经过高度优化,能够充分利用CPU和GPU的性能,加快推理速度。
- 跨平台:支持Windows、Linux、macOS等多种操作系统,且兼容多种编程语言如Python、C++等。
- 易于集成:ONNX格式的模型可以轻松集成到各种应用中,无需担心框架依赖。
- 支持多种硬件加速器:如NVIDIA的TensorRT、Intel的OpenVINO等,进一步提升推理效率。
环境准备
在开始之前,确保您的系统已安装以下软件:
- Python 3.7+
- ONNXRuntime
- OpenCV
- NumPy
您可以使用以下命令安装所需的Python库:
pip install onnxruntime opencv-python numpy
代码详解
下面我们将逐步解析实现目标检测的完整代码。
导入必要的库
首先,导入所有需要的Python库:
import cv2
import numpy as np
import onnxruntime as ort
import hashlib
cv2:用于图像处理。numpy:用于数值计算。onnxruntime:用于加载和运行ONNX模型。hashlib:用于生成颜色映射。
定义类别与颜色映射
定义检测模型的类别,并为每个类别生成唯一的颜色,便于在图像上可视化。
# 定义您的12个类别
CLASSES = [
'book', 'bottle', 'cellphone', 'drink', 'eat', 'face',
'food', 'head', 'keyboard', 'mask', 'person', 'talk'
]
def name_to_color(name):
"""根据类名生成固定的颜色。"""
hash_str = hashlib.md5(name.encode('utf-8')).hexdigest()
r = int(hash_str[0:2], 16)
g = int(hash_str[2:4], 16)
b = int(hash_str[4:6], 16)
return (r, g, b) # OpenCV使用BGR格式
CLASSES:包含12个目标类别。name_to_color:通过哈希算法为每个类别生成唯一颜色,确保不同类别在图像中具有不同颜色的边框。
辅助函数
定义一些辅助函数,包括激活函数、坐标转换和IoU计算。
def sigmoid(x):
"""Sigmoid激活函数。"""
return 1 / (1 + np.exp(-x))
def xywh2xyxy(x):
"""
将 (x, y, w, h) 转换为 (x1, y1, x2, y2)
"""
y = np.copy(x)
y[..., 0] = x[..., 0] - x[..., 2] / 2 # x1
y[..., 1] = x[..., 1] - x[..., 3] / 2 # y1
y[..., 2] = x[..., 0] + x[..., 2] / 2 # x2
y[..., 3] = x[..., 1] + x[..., 3] / 2 # y2
return y
def compute_iou(box, boxes):
"""
计算单个box与多个boxes的IoU
box: (4,) -> (x1, y1, x2, y2)
boxes: (N, 4)
"""
xmin = np.maximum(box[0], boxes[:, 0])
ymin = np.maximum(box[1], boxes[:, 1])
xmax = np.minimum(box[2], boxes[:, 2])
ymax = np.minimum(box[3], boxes[:, 3])
inter_w = np.maximum(0, xmax - xmin)
inter_h = np.maximum(0, ymax - ymin)
intersection = inter_w * inter_h
box_area = (box[2] - box[0]) * (box[3] - box[1])
boxes_area = (boxes[:,2] - boxes[:,0]) * (boxes[:,3] - boxes[:,1])
union = box_area + boxes_area - intersection
iou = intersection / union
return iou
sigmoid:用于将模型输出的类别分数映射到0到1之间。xywh2xyxy:将中心坐标和宽高格式的框转换为左上角和右下角��坐标格式。compute_iou:计算两个框的交并比(IoU),用于非极大值抑制(NMS)。
加载ONNX模型
加载ONNX格式的目标检测模型,并获取模型的输入输出信息。
def load_model(model_path, providers=['CPUExecutionProvider']):
"""
加载ONNX模型
"""
session = ort.InferenceSession(model_path, providers=providers)
input_names = [inp.name for inp in session.get_inputs()]
output_names = [out.name for out in session.get_outputs()]
input_shape = session.get_inputs()[0].shape # 通常为 [batch, channel, height, width]
return session, input_names, output_names, input_shape
load_model:加载指定路径的ONNX模型,返回会话对象、输入输出名称及输入形状。
图像预处理
将输入图像读取并预处理为模型所需的格式。
def preprocess_image(image_path, input_width, input_height):
"""
读取并预处理图像
"""
image = cv2.imread(image_path)
if image is None:
raise FileNotFoundError(f"图像未找到: {image_path}")
original_height, original_width = image.shape[:2]
image_rgb = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
resized = cv2.resize(image_rgb, (input_width, input_height))
input_image = resized.astype(np.float32) / 255.0 # 归一化
input_image = input_image.transpose(2, 0, 1) # [H, W, C] -> [C, H, W]
input_tensor = np.expand_dims(input_image, axis=0) # [1, C, H, W]
return image, input_tensor, original_width, original_height
preprocess_image:读取图像,调整尺寸,归一化,并转换为模型输入所需的张量格式。
推理过程
使用ONNXRuntime进行模型推理,获取输出结果。
def predict(model_path, image_path, output_image_file, conf_threshold=0.6, iou_threshold=0.5):
# 加载模型
session, input_names, output_names, input_shape = load_model(model_path, providers=['CPUExecutionProvider'])
_, _, input_height, input_width = input_shape
# 预处理图像
image, input_tensor, original_width, original_height = preprocess_image(image_path, input_width, input_height)
# 推理
outputs = session.run(output_names, {input_names[0]: input_tensor})
# 后处理
boxes, confidences, class_ids = postprocess(
outputs,
original_width=original_width,
original_height=original_height,
input_width=input_width,
input_height=input_height,
conf_threshold=conf_threshold, # 置信度阈值
iou_threshold=iou_threshold # IoU 阈值
)
if len(boxes) == 0:
print("未检测到任何目标。")
return
# 可视化结果
visualize(image, boxes, confidences, class_ids, output_path=output_image_file)
predict:主函数,加载模型,预处理图像,执行推理,后处理结果,并可视化检测结果。
后处理与非极大值抑制(NMS)
对模型输出进行后处理,包括应用阈值和NMS以去除冗余框。
def postprocess(outputs, original_width, original_height, input_width, input_height, conf_threshold=0.7, iou_threshold=0.5):
"""
后处理步骤,按类别应用NMS
"""
# 假设只有一个输出,形状为 [1, 16, 8400]
output = outputs[0] # shape: (1,16,8400)
predictions = np.squeeze(output, axis=0).T # shape: (8400,16)
print(f"总预测数量: {predictions.shape[0]}")
# 前4列为 (x, y, w, h)
boxes = predictions[:, :4]
# 后12列为类别分数(需应用sigmoid)
class_scores = sigmoid(predictions[:, 4:])
# 找到每个预测的最大类别概率及其对应的类别ID
class_ids = np.argmax(class_scores, axis=1)
confidences = np.max(class_scores, axis=1)
# 应用置信度阈值
mask = confidences > conf_threshold
boxes = boxes[mask]
confidences = confidences[mask]
class_ids = class_ids[mask]
print(f"应用置信度阈值后: {boxes.shape[0]} 个框")
print(f"置信度分布: 最小={confidences.min():.4f}, 最大={confidences.max():.4f}, 平均={confidences.mean():.4f}")
if len(boxes) == 0:
return [], [], []
# 将 (x, y, w, h) 转换为 (x1, y1, x2, y2)
boxes_xyxy = xywh2xyxy(boxes)
# 映射回原始图像尺寸
scale_w = original_width / input_width
scale_h = original_height / input_height
boxes_xyxy[:, [0, 2]] *= scale_w
boxes_xyxy[:, [1, 3]] *= scale_h
boxes_xyxy = boxes_xyxy.astype(np.int32)
# 准备 NMS 所需的输入
boxes_list = boxes_xyxy.tolist()
scores_list = confidences.tolist()
# 使用 OpenCV 的 NMS 函数,按类别分开处理
final_boxes = []
final_confidences = []
final_class_ids = []
unique_classes = np.unique(class_ids)
for cls in unique_classes:
cls_mask = class_ids == cls
cls_boxes = [boxes_list[i] for i in range(len(class_ids)) if cls_mask[i]]
cls_scores = [scores_list[i] for i in range(len(class_ids)) if cls_mask[i]]
if len(cls_boxes) == 0:
continue
# OpenCV 的 NMSBoxes 需要以 [x, y, w, h] 的格式
# 这里我们需要将 (x1, y1, x2, y2) 转换为 (x, y, w, h)
cls_boxes_xywh = []
for box in cls_boxes:
x1, y1, x2, y2 = box
cls_boxes_xywh.append([x1, y1, x2 - x1, y2 - y1])
# 执行NMS
indices = cv2.dnn.NMSBoxes(cls_boxes_xywh, cls_scores, conf_threshold, iou_threshold)
if len(indices) > 0:
for i in indices.flatten():
final_boxes.append(cls_boxes[i])
final_confidences.append(cls_scores[i])
final_class_ids.append(cls)
print(f"应用NMS后: {len(final_boxes)} 个框")
return final_boxes, final_confidences, final_class_ids
- 步骤解析:
- 模型输出解析:假设模型输出形状为
[1, 16, 8400],即1个批次、16(4个坐标值+12个类别)、8400个预测框。 - Sigmoid激活:将类别分数通过Sigmoid函数映射到0到1之间。
- 置信度筛选:只保留置信度高于阈值的预测框。
- 坐标转换:将中心坐标和宽高转换为左上角和右下角坐标,并映射回原始图像尺寸。
- 非极大值抑制(NMS):按类别对预测框进行NMS,去除冗余框。
- 模型输出解析:假设模型输出形状为
可视化检测结果
在原始图像上绘制检测到的目标框及其类别标签。
def visualize(image, boxes, confidences, class_ids, output_path='result.jpg'):
"""
在图像上绘制检测结果
"""
image_draw = image.copy()
for (bbox, score, cls_id) in zip(boxes, confidences, class_ids):
x1, y1, x2, y2 = bbox
cls_name = CLASSES[cls_id]
label = f"{cls_name}:{score:.2f}"
color = name_to_color(cls_name) # 绿色框
cv2.rectangle(image_draw, (x1, y1), (x2, y2), color, 2)
# 绘制标签背景
(label_width, label_height), _ = cv2.getTextSize(label, cv2.FONT_HERSHEY_SIMPLEX, 0.5, 1)
cv2.rectangle(image_draw, (x1, y1 - label_height - 10), (x1 + label_width, y1), color, -1)
# 绘制标签文字
cv2.putText(image_draw, label, (x1, y1 - 5),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0,0,0), 1, cv2.LINE_AA)
cv2.imwrite(output_path, image_draw)
print(f"推理完成,结果已保存为 {output_path}")
- 功能:
- 遍历所有检测到的目标,绘制矩形框。
- 在框的上方显示类别名称和置信度。
- 使用预先生成的颜色区分不同类别。
整体预测流程
将以上步骤整合在一起,实现完整的目标检测流程。
def predict(model_path, image_path, output_image_file, conf_threshold=0.6, iou_threshold=0.5):
# 加载模型
session, input_names, output_names, input_shape = load_model(model_path, providers=['CPUExecutionProvider'])
_, _, input_height, input_width = input_shape
# 预处理图像
image, input_tensor, original_width, original_height = preprocess_image(image_path, input_width, input_height)
# 推理
outputs = session.run(output_names, {input_names[0]: input_tensor})
# 后处理
boxes, confidences, class_ids = postprocess(
outputs,
original_width=original_width,
original_height=original_height,
input_width=input_width,
input_height=input_height,
conf_threshold=conf_threshold, # 置信度阈值
iou_threshold=iou_threshold # IoU 阈值
)
if len(boxes) == 0:
print("未检测到任何目标。")
return
# 可视化结果
visualize(image, boxes, confidences, class_ids, output_path=output_image_file)
- 流程步骤:
- 加载模型。
- 预处理输入图像。
- 进行推理,获取模型输出。
- 对输出进行后处理,筛选有效框。
- 在图像上绘制检测结果并保存。
完整代码示例
以下是完整的目标检测代码,结合了上述所有部分:
import cv2
import numpy as np
import onnxruntime as ort
import yaml
import hashlib
def name_to_color(name):
"""根据类名生成固定的颜色。"""
hash_str = hashlib.md5(name.encode('utf-8')).hexdigest()
r = int(hash_str[0:2], 16)
g = int(hash_str[2:4], 16)
b = int(hash_str[4:6], 16)
return (r, g, b) # OpenCV使用BGR格式
# 定义您的12个类别
CLASSES = [
'book', 'bottle', 'cellphone', 'drink', 'eat', 'face',
'food', 'head', 'keyboard', 'mask', 'person', 'talk'
]
def sigmoid(x):
"""Sigmoid激活函数。"""
return 1 / (1 + np.exp(-x))
def xywh2xyxy(x):
"""
将 (x, y, w, h) 转换为 (x1, y1, x2, y2)
"""
y = np.copy(x)
y[..., 0] = x[..., 0] - x[..., 2] / 2 # x1
y[..., 1] = x[..., 1] - x[..., 3] / 2 # y1
y[..., 2] = x[..., 0] + x[..., 2] / 2 # x2
y[..., 3] = x[..., 1] + x[..., 3] / 2 # y2
return y
def compute_iou(box, boxes):
"""
计算单个box与多个boxes的IoU
box: (4,) -> (x1, y1, x2, y2)
boxes: (N, 4)
"""
xmin = np.maximum(box[0], boxes[:, 0])
ymin = np.maximum(box[1], boxes[:, 1])
xmax = np.minimum(box[2], boxes[:, 2])
ymax = np.minimum(box[3], boxes[:, 3])
inter_w = np.maximum(0, xmax - xmin)
inter_h = np.maximum(0, ymax - ymin)
intersection = inter_w * inter_h
box_area = (box[2] - box[0]) * (box[3] - box[1])
boxes_area = (boxes[:,2] - boxes[:,0]) * (boxes[:,3] - boxes[:,1])
union = box_area + boxes_area - intersection
iou = intersection / union
return iou
def load_model(model_path, providers=['CPUExecutionProvider']):
"""
加载ONNX模型
"""
session = ort.InferenceSession(model_path, providers=providers)
input_names = [inp.name for inp in session.get_inputs()]
output_names = [out.name for out in session.get_outputs()]
input_shape = session.get_inputs()[0].shape # 通常为 [batch, channel, height, width]
return session, input_names, output_names, input_shape
def preprocess_image(image_path, input_width, input_height):
"""
读取并预处理图像
"""
image = cv2.imread(image_path)
if image is None:
raise FileNotFoundError(f"图像未找到: {image_path}")
original_height, original_width = image.shape[:2]
image_rgb = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
resized = cv2.resize(image_rgb, (input_width, input_height))
input_image = resized.astype(np.float32) / 255.0 # 归一化
input_image = input_image.transpose(2, 0, 1) # [H, W, C] -> [C, H, W]
input_tensor = np.expand_dims(input_image, axis=0) # [1, C, H, W]
return image, input_tensor, original_width, original_height
def postprocess(outputs, original_width, original_height, input_width, input_height, conf_threshold=0.7, iou_threshold=0.5):
"""
后处理步骤,按类别应用NMS
"""
# 假设只有一个输出,形状为 [1, 16, 8400]
output = outputs[0] # shape: (1,16,8400)
predictions = np.squeeze(output, axis=0).T # shape: (8400,16)
print(f"总预测数量: {predictions.shape[0]}")
# 前4列为 (x, y, w, h)
boxes = predictions[:, :4]
# 后12列为类别分数(需应用sigmoid)
class_scores = sigmoid(predictions[:, 4:])
# 找到每个预测的最大类别概率及其对应的类别ID
class_ids = np.argmax(class_scores, axis=1)
confidences = np.max(class_scores, axis=1)
# 应用置信度阈值
mask = confidences > conf_threshold
boxes = boxes[mask]
confidences = confidences[mask]
class_ids = class_ids[mask]
print(f"应用置信度阈值后: {boxes.shape[0]} 个框")
print(f"置信度分布: 最小={confidences.min():.4f}, 最大={confidences.max():.4f}, 平均={confidences.mean():.4f}")
if len(boxes) == 0:
return [], [], []
# 将 (x, y, w, h) 转换为 (x1, y1, x2, y2)
boxes_xyxy = xywh2xyxy(boxes)
# 映射回原始图像尺寸
scale_w = original_width / input_width
scale_h = original_height / input_height
boxes_xyxy[:, [0, 2]] *= scale_w
boxes_xyxy[:, [1, 3]] *= scale_h
boxes_xyxy = boxes_xyxy.astype(np.int32)
# 准备 NMS 所需的输入
boxes_list = boxes_xyxy.tolist()
scores_list = confidences.tolist()
# 使用 OpenCV 的 NMS 函数,按类别分开处理
final_boxes = []
final_confidences = []
final_class_ids = []
unique_classes = np.unique(class_ids)
for cls in unique_classes:
cls_mask = class_ids == cls
cls_boxes = [boxes_list[i] for i in range(len(class_ids)) if cls_mask[i]]
cls_scores = [scores_list[i] for i in range(len(class_ids)) if cls_mask[i]]
if len(cls_boxes) == 0:
continue
# OpenCV 的 NMSBoxes 需要以 [x, y, w, h] 的格式
# 这里我们需要将 (x1, y1, x2, y2) 转换为 (x, y, w, h)
cls_boxes_xywh = []
for box in cls_boxes:
x1, y1, x2, y2 = box
cls_boxes_xywh.append([x1, y1, x2 - x1, y2 - y1])
# 执行NMS
indices = cv2.dnn.NMSBoxes(cls_boxes_xywh, cls_scores, conf_threshold, iou_threshold)
if len(indices) > 0:
for i in indices.flatten():
final_boxes.append(cls_boxes[i])
final_confidences.append(cls_scores[i])
final_class_ids.append(cls)
print(f"应用NMS后: {len(final_boxes)} 个框")
return final_boxes, final_confidences, final_class_ids
def visualize(image, boxes, confidences, class_ids, output_path='result.jpg'):
"""
在图像上绘制检测结果
"""
image_draw = image.copy()
for (bbox, score, cls_id) in zip(boxes, confidences, class_ids):
x1, y1, x2, y2 = bbox
cls_name = CLASSES[cls_id]
label = f"{cls_name}:{score:.2f}"
color = name_to_color(cls_name) # 类别颜色
cv2.rectangle(image_draw, (x1, y1), (x2, y2), color, 2)
# 绘制标签背景
(label_width, label_height), _ = cv2.getTextSize(label, cv2.FONT_HERSHEY_SIMPLEX, 0.5, 1)
cv2.rectangle(image_draw, (x1, y1 - label_height - 10), (x1 + label_width, y1), color, -1)
# 绘制标签文字
cv2.putText(image_draw, label, (x1, y1 - 5),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0,0,0), 1, cv2.LINE_AA)
cv2.imwrite(output_path, image_draw)
print(f"推理完成,结果已保存为 {output_path}")
def predict(model_path, image_path, output_image_file, conf_threshold=0.6, iou_threshold=0.5):
# 加载模型
session, input_names, output_names, input_shape = load_model(model_path, providers=['CPUExecutionProvider'])
_, _, input_height, input_width = input_shape
# 预处理图像
image, input_tensor, original_width, original_height = preprocess_image(image_path, input_width, input_height)
# 推理
outputs = session.run(output_names, {input_names[0]: input_tensor})
# 后处理
boxes, confidences, class_ids = postprocess(
outputs,
original_width=original_width,
original_height=original_height,
input_width=input_width,
input_height=input_height,
conf_threshold=conf_threshold, # 置信度阈值
iou_threshold=iou_threshold # IoU 阈值
)
if len(boxes) == 0:
print("未检测到任何目标。")
return
# 可视化结果
visualize(image, boxes, confidences, class_ids, output_path=output_image_file)
if __name__ == "__main__":
model_path = 'classroom_obd.onnx'
image_path = '002899.jpg'
output_image_file = "onnxruntime_result.jpg"
predict(model_path, image_path, output_image_file)
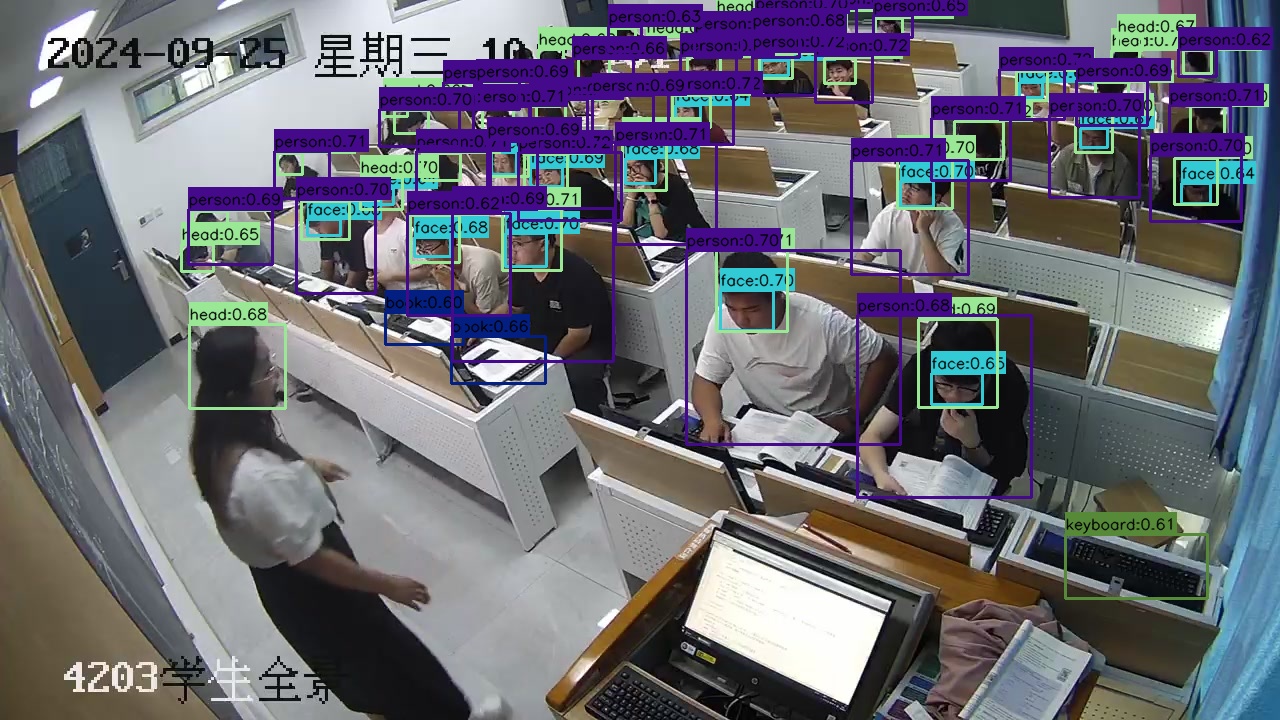
代码运行示例
运行上述代码后,您将获得一张带有检测框和类别标签的图像。例如:
总预测数量: 8400
应用置信度阈值后: 599 个框
置信度分布: 最小=0.7012, 最大=0.9987, 平均=0.8564
应用NMS后: 98 个框
推理完成,结果已保存为 result.jpg
性能优化与调优
为了提升目标检测的推理性能,您可以考虑以下优化方法:
-
硬件加速:ONNXRuntime支持��多种硬件加速器,如CPU、GPU。通过配置
providers参数,可以利用GPU加速推理。session, input_names, output_names, input_shape = load_model(model_path, providers=['CUDAExecutionProvider']) -
模型量化:通过量化模型(如INT8量化),可以减少模型大小和加快推理速度,同时保持较高的准确性。
-
批处理推理:如果处理多张图像,可以批量输入,提高推理效率。
-
优化图像预处理:使用更高效的图像处理库或方法,加快预处理速度。
-
模型剪枝:通过剪枝技术减少模型参数,提升推理速度。
结论
本文详细介绍了如何使用ONNXRuntime进行目标检测,从模型加载、图像预处理、推理到后处理和结果可视化。 ONNXRuntime凭借其高性能和灵活性,是部署深度学习模型的理想选择。 通过本文提供的代码示例,您可以轻松实现高效的目标检测系统,并根据具体需求进行性能优化。