import cv2
import numpy as np
import onnxruntime as ort
import yaml
import hashlib
def name_to_color(name):
"""根据类名生成固定的颜色。"""
hash_str = hashlib.md5(name.encode('utf-8')).hexdigest()
r = int(hash_str[0:2], 16)
g = int(hash_str[2:4], 16)
b = int(hash_str[4:6], 16)
return (r, g, b)
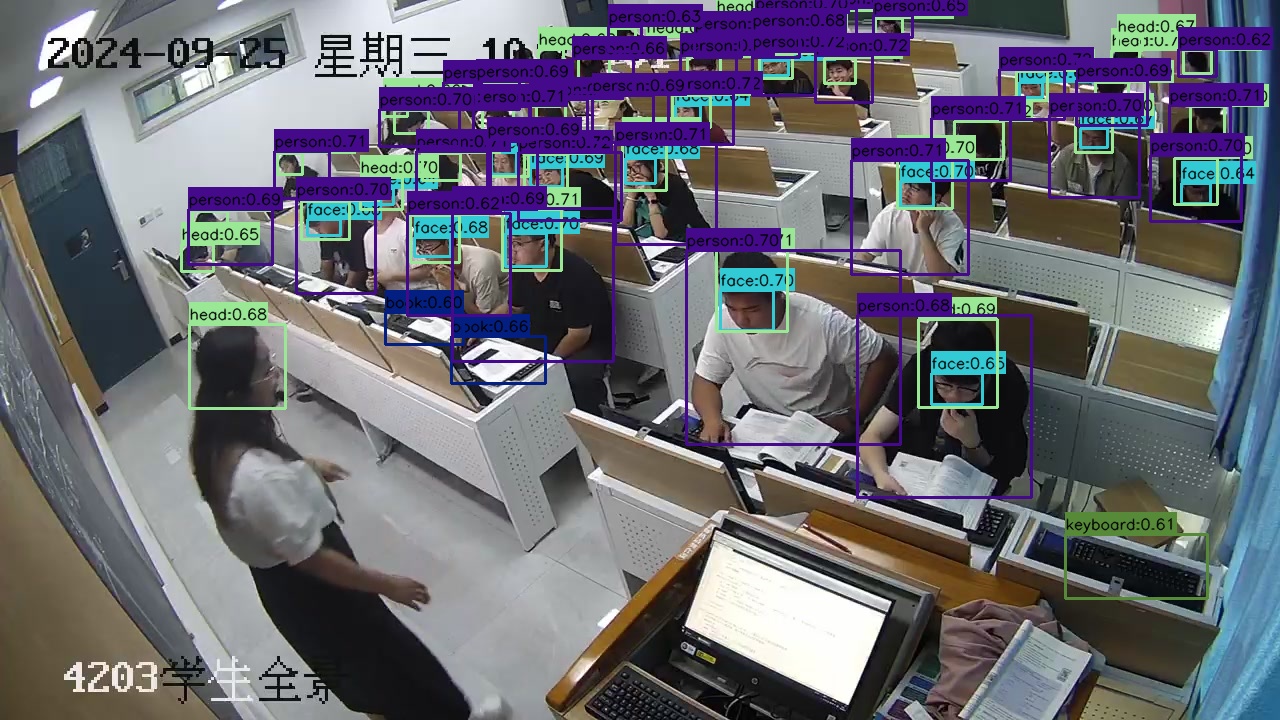
CLASSES = [
'book', 'bottle', 'cellphone', 'drink', 'eat', 'face',
'food', 'head', 'keyboard', 'mask', 'person', 'talk'
]
def sigmoid(x):
"""Sigmoid激活函数。"""
return 1 / (1 + np.exp(-x))
def xywh2xyxy(x):
"""
将 (x, y, w, h) 转换为 (x1, y1, x2, y2)
"""
y = np.copy(x)
y[..., 0] = x[..., 0] - x[..., 2] / 2
y[..., 1] = x[..., 1] - x[..., 3] / 2
y[..., 2] = x[..., 0] + x[..., 2] / 2
y[..., 3] = x[..., 1] + x[..., 3] / 2
return y
def compute_iou(box, boxes):
"""
计算单个box与多个boxes的IoU
box: (4,) -> (x1, y1, x2, y2)
boxes: (N, 4)
"""
xmin = np.maximum(box[0], boxes[:, 0])
ymin = np.maximum(box[1], boxes[:, 1])
xmax = np.minimum(box[2], boxes[:, 2])
ymax = np.minimum(box[3], boxes[:, 3])
inter_w = np.maximum(0, xmax - xmin)
inter_h = np.maximum(0, ymax - ymin)
intersection = inter_w * inter_h
box_area = (box[2] - box[0]) * (box[3] - box[1])
boxes_area = (boxes[:,2] - boxes[:,0]) * (boxes[:,3] - boxes[:,1])
union = box_area + boxes_area - intersection
iou = intersection / union
return iou
def load_model(model_path, providers=['CPUExecutionProvider']):
"""
加载ONNX模型
"""
session = ort.InferenceSession(model_path, providers=providers)
input_names = [inp.name for inp in session.get_inputs()]
output_names = [out.name for out in session.get_outputs()]
input_shape = session.get_inputs()[0].shape
return session, input_names, output_names, input_shape
def preprocess_image(image_path, input_width, input_height):
"""
读取并预处理图像
"""
image = cv2.imread(image_path)
if image is None:
raise FileNotFoundError(f"图像未找到: {image_path}")
original_height, original_width = image.shape[:2]
image_rgb = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
resized = cv2.resize(image_rgb, (input_width, input_height))
input_image = resized.astype(np.float32) / 255.0
input_image = input_image.transpose(2, 0, 1)
input_tensor = np.expand_dims(input_image, axis=0)
return image, input_tensor, original_width, original_height
def postprocess(outputs, original_width, original_height, input_width, input_height, conf_threshold=0.7, iou_threshold=0.5):
"""
后处理步骤,按类别应用NMS
"""
output = outputs[0]
predictions = np.squeeze(output, axis=0).T
print(f"总预测数量: {predictions.shape[0]}")
boxes = predictions[:, :4]
class_scores = sigmoid(predictions[:, 4:])
class_ids = np.argmax(class_scores, axis=1)
confidences = np.max(class_scores, axis=1)
mask = confidences > conf_threshold
boxes = boxes[mask]
confidences = confidences[mask]
class_ids = class_ids[mask]
print(f"应用置信度阈值后: {boxes.shape[0]} 个框")
print(f"置信度分布: 最小={confidences.min():.4f}, 最大={confidences.max():.4f}, 平均={confidences.mean():.4f}")
if len(boxes) == 0:
return [], [], []
boxes_xyxy = xywh2xyxy(boxes)
scale_w = original_width / input_width
scale_h = original_height / input_height
boxes_xyxy[:, [0, 2]] *= scale_w
boxes_xyxy[:, [1, 3]] *= scale_h
boxes_xyxy = boxes_xyxy.astype(np.int32)
boxes_list = boxes_xyxy.tolist()
scores_list = confidences.tolist()
final_boxes = []
final_confidences = []
final_class_ids = []
unique_classes = np.unique(class_ids)
for cls in unique_classes:
cls_mask = class_ids == cls
cls_boxes = [boxes_list[i] for i in range(len(class_ids)) if cls_mask[i]]
cls_scores = [scores_list[i] for i in range(len(class_ids)) if cls_mask[i]]
if len(cls_boxes) == 0:
continue
cls_boxes_xywh = []
for box in cls_boxes:
x1, y1, x2, y2 = box
cls_boxes_xywh.append([x1, y1, x2 - x1, y2 - y1])
indices = cv2.dnn.NMSBoxes(cls_boxes_xywh, cls_scores, conf_threshold, iou_threshold)
if len(indices) > 0:
for i in indices.flatten():
final_boxes.append(cls_boxes[i])
final_confidences.append(cls_scores[i])
final_class_ids.append(cls)
print(f"应用NMS后: {len(final_boxes)} 个框")
return final_boxes, final_confidences, final_class_ids
def visualize(image, boxes, confidences, class_ids, output_path='result.jpg'):
"""
在图像上绘制检测结果
"""
image_draw = image.copy()
for (bbox, score, cls_id) in zip(boxes, confidences, class_ids):
x1, y1, x2, y2 = bbox
cls_name = CLASSES[cls_id]
label = f"{cls_name}:{score:.2f}"
color = name_to_color(cls_name)
cv2.rectangle(image_draw, (x1, y1), (x2, y2), color, 2)
(label_width, label_height), _ = cv2.getTextSize(label, cv2.FONT_HERSHEY_SIMPLEX, 0.5, 1)
cv2.rectangle(image_draw, (x1, y1 - label_height - 10), (x1 + label_width, y1), color, -1)
cv2.putText(image_draw, label, (x1, y1 - 5),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0,0,0), 1, cv2.LINE_AA)
cv2.imwrite(output_path, image_draw)
print(f"推理完成,结果已保存为 {output_path}")
def predict(model_path, image_path, output_image_file, conf_threshold=0.6, iou_threshold=0.5):
session, input_names, output_names, input_shape = load_model(model_path, providers=['CPUExecutionProvider'])
_, _, input_height, input_width = input_shape
image, input_tensor, original_width, original_height = preprocess_image(image_path, input_width, input_height)
outputs = session.run(output_names, {input_names[0]: input_tensor})
boxes, confidences, class_ids = postprocess(
outputs,
original_width=original_width,
original_height=original_height,
input_width=input_width,
input_height=input_height,
conf_threshold=conf_threshold,
iou_threshold=iou_threshold
)
if len(boxes) == 0:
print("未检测到任何目标。")
return
visualize(image, boxes, confidences, class_ids, output_path=output_image_file)
if __name__ == "__main__":
model_path = 'classroom_obd.onnx'
image_path = '002899.jpg'
output_image_file = "onnxruntime_result.jpg"
predict(model_path, image_path, output_image_file)